Como funciona o sonar ativo?
O Sonar é instrumento fundamental da guerra antissubmarino. Ele é um dispositivo criado para detectar e localizar objetos submersos na água por meio das ondas sonoras que os alvos refletem ou produzem.
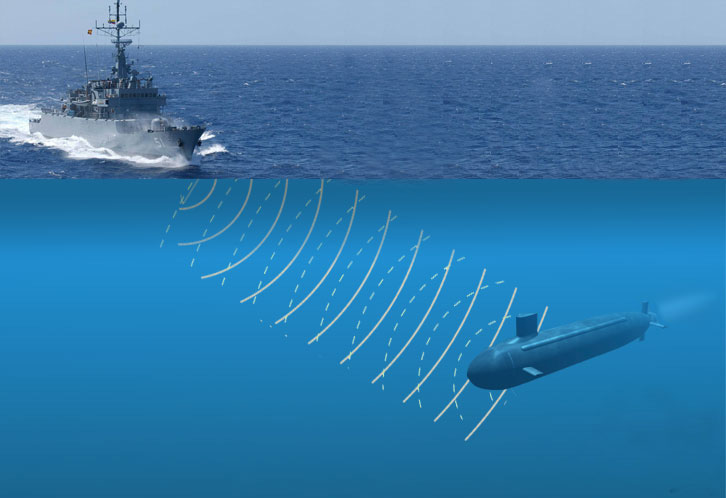
O sonar ativo funciona basicamente como o radar, só que usa pulsos sonoros no lugar das ondas de rádio. As ondas de rádio não se propagam sob a água, além de poucos metros.
O pulso do sonar (para ouvir o “ping” do sonar ativo, clique aqui ), é emitido e ao encontrar um obstáculo, retorna ao emissor. Medindo-se o tempo que o “ping” levou para ir e voltar, tem-se como calcular a distância do objeto ecoado com “relativa” precisão.
A precisão é “relativa” porque os pulsos do sonar sofrem diversos tipos de atenuação causados pela temperatura, salinidade e pressão da água, que mudam de acordo com as estações do ano, posições geográficas e condições atmosféricas.
O som é uma ondulação mecânica cuja propagação é possível por causa da conexão elástica entre as moléculas.


As moléculas nos líquidos estão mais próximas umas das outra do que no ar, porisso a velocidade do som na água é 4,4 vezes maior que no ar. A velocidade exata do som na água é de 1.438m/s, quando a temperatura da água é de 8 graus Celsius.
A velocidade e a direção das ondas sonoras dependem da temperatura, salinidade e profundidade da água.
Por exemplo, o aumento da temperatura da água faz com que a velocidade do som seja maior. Quando o som se propaga através de camadas de água de diferentes temperaturas, ocorre o fenômeno da refração, que é o desvio da onda sonora. A refração pode ser negativa (verão) ou positiva (inverno).

Refração negativa (gráfico acima): durante o verão, a temperatura da água diminui com o aumento da profundidade. A onda sonora se desvia para o fundo do mar. Se submarino está em menor profundidade, perto da superfície, o sonar do navio pode não detectar o submarino.


Refração positiva (gráficos acima): durante o inverno, a temperatura da água aumenta com a profundidade. As ondas sonoras se curvam para a superfície do mar. Se o submarino está junto à superfície do mar, o sonar do navio pode detectá-lo. A refração positiva torna o alcance do sonar maior.

As termoclinas (gráfico acima): quando se usa um batitermógrafo, é possível detectar camadas de água onde a temperatura é maior do que a camada mais quente da superfície e que tem logo abaixo dela, uma camada de água mais fria. Quando encontra uma camada de temperatura menor, a onda sonora se curva rapidamente para o fundo. A onda sonora vai para o fundo do mar e torna-se inútil. Se um submarino está submerso na termoclina ou abaixo dela, ele não será capturado pela onda sonora e assim permanecerá indetectado.
Existem normalmente duas camadas de termoclinas no verão. Uma camada fica a cerca de 15 a 20 metros de profundidade, e uma outra em torno de 150 metros de profundidade. A de profundidade de 15 a 20 metros é importante, porque durante o verão, à tarde, se as condições climáticas são boas, um submarino não pode ser detectado por um sonar de casco de navio.
Ao mesmo tempo, essa profundidade é boa para observação e lançamento de torpedos. Se um navio de superfície pretende detectar um submarino, ele terá de ser equipado com sonar rebocado de profundidade variável (VDS). Nesse caso, o sonar deve ser mergulhado abaixo da termoclina.

Como foi, um fenômeno muito conhecido que prejudica os sonares ativos são as camadas termais ou termoclinas, camadas de água que sofrem uma mudança brusca de temperatura, que desviam as ondas dos sonares, para cima e para baixo, criando zonas de “sombra”, onde os submarinos podem se ocultar (figura acima).
Já que o mar é um ambiente dinâmico, principalmente com os navios em movimento, as camadas termais podem mudar de profundidade, alterando a curva de alcance do sonar. Essas curvas de alcance são computadas com dados obtidos no lançamento de sondas batitermográficas (BT), que vão mergulhando e transferindo para o navio ou aeronave, a localização das camadas termais naquele momento, a pressão da água e a temperatura, dados esses que permitem obter a velocidade do som em dada profundidade. Essas sondas são lançadas periodicamente.
Notar que no desenho, parte do feixe do sonar emitido pelo navio, se propaga próximo da superfície, no fenômeno conhecido como “duto de superfície” e parte do feixe se desvia para baixo, voltando para cima logo adiante (por causa do aumento de pressão, que eleva a velocidade do som). O desvio dos feixes sonoros deixa uma zona de “sombra”, na qual o submarino normalmente procura se ocultar, pois ele também possui batitermógrafo no casco e sabe qual é a profundidade da camada enquanto navega.
Nessas condições, o submarino conhece a posição do navio de superfície, porque usa o sonar passivo, que usa hidrofones só para escuta. Normalmente, o alcance do sonar passivo de um submarino é no mínimo o dobro do alcance do sonar ativo de um navio de superfície, o que lhe dá uma enorme vantagem tática.

Submarinos sabem com antecedência onde estão os navios inimigos, ouvindo o ruído de suas máquinas e a emissão dos seus sonares ativos. Desse modo, os submarinos podem ocultar-se abaixo da termoclina e esperar o melhor momento e posição para o ataque.
Em certas condições, os submarinos conseguem escutar navios de superfície a mais de 50 milhas de distância, enquanto o alcance típico do sonar ativo dos navios gira em torno de 10 milhas (excetuando-se as situações de “zona de convergência”). Os sonares ativos de helicópteros têm alcance ainda menor, pois são sonares de alta frequência.
Para enfrentar o problema das camadas termais, usa-se o VDS (Variable Depth Sonar – Sonar de Profundidade Variável), que pode ser mergulhado dentro da camada.
Como desvantagem, o sonar de profundidade variável tem alcance menor que o sonar de casco, pois normalmente emprega altas frequências devido ao pequeno tamanho do transdutor. O VDS também limita a mobilidade do navio, que não pode navegar em altas velocidades nem fazer manobras bruscas, sob o risco de arrebentar o cabo e perder o “peixe”. Nas fotos abaixo, alguns tipos de “peixes” VDS, americano, canadense e outro francês.






É possível detectar o submarino com o sonar ativo caso esteja repousado no leito marinho ou só se ele estiver em movimento?
Os sonares são projetados para detectar objetos submersos pela emissão de ondas sonoras e pela interpretação dos ecos que retornam. A capacidade de um sonar detectar um submarino depende de vários fatores, que incluem, mas não se limitam a: Tipo de Sonar: Existem dois tipos principais de sonar – ativo e passivo. O sonar ativo emite pulsos acústicos e detecta objetos pela análise dos ecos recebidos. O sonar passivo não emite som; ele escuta os sons produzidos por outros objetos, como motores de submarinos. Ambiente: O leito marinho pode ser complexo, com variações topográficas e composições de materiais que podem… Read more »
Ou seja, não tem pra fragata nenhuma, por mais moderna que seja, quando tem um SUB por perto.
Eduardo Morais, depende da profundidade e das temperaturas. Mas é muito difícil.
Uma das táticas usadas por submarinos convencionais quando caçados é pousar no leito marinho enquanto esperam as forças inimigas passarem e irem para outro lugar.
Alguém sabe me dizer se já se cogitou a hipótese de usar Navios Sísmicos para localizar submarinos? Creio que sem muita dificuldade eles poderiam ser utilizados no modo passivo para localizar submarinos. Com um pouco mais de trabalho desenvolvendo software e hardware eles poderiam ser usados no modo ativo.
Navios sísmicos são tradicionalmente usados na exploração de petróleo e gás, utilizando ondas sonoras para mapear estruturas geológicas abaixo do leito marinho. Esses navios empregam fontes de som de alta energia, como canhões de ar ou vibradores, para gerar ondas acústicas que penetram o subsolo marinho, com os ecos sendo capturados por hidrofones rebocados. A hipótese de usar navios sísmicos para localizar submarinos se baseia na ideia de que eles poderiam detectar a presença de objetos grandes como submarinos devido à sua capacidade de capturar e analisar reflexões sonoras. No entanto, há várias considerações a serem feitas: Frequência e Energia:… Read more »
Para desechar um ataque com torpedos o Sub pode estar a qualquer profundidade ou precisa estar à profundidade de periscópio como nos filmes? O torpedo precisa correr “à flor da superfície ” ou pode atacar de baixo pra cima o navio? Desculpem os termos nada técnicosobre.
Mahan, o submarino pode fazer o ataque unicamente com os dados dos sonares, não é preciso subir para a cota periscópica. Já no final da Segunda Guerra Mundial os alemães desenvolveram esse sistema com os novos submarinos Tipo XXI. O torpedo pode correr a profundidades maiores, pois também é projetado para engajar outros submarinos, que podem estar a profundidades diversas. A descrição que você fez é de ataques de submarinos mais típicos da Segunda Guerra Mundial, quando a maioria dos torpedos era de corrida reta e explodiam ao colidir com o casco, e por isso tinham que estar a pouca… Read more »
Eduardo Morais, Sem querer me meter na resposta do Galante que é da área, mas já me metendo, rsss como o sonar de um submarino não é de alta definição e portanto, não forma imagem, como são aqueles sonares ativos próprios para determinar o relevo do leito do oceano ou achar navios (e submarinos) naufragados, não há como um sonar ativo de uso militar achar um submarino pousado no fundo. Quando um submarino está em movimento, mesmo próximo do leito submarino, o sonar ativo de um submarino inimigo mais acima usa do mesmo método do radar capaz de “olhar” para… Read more »
fundo = leito submarino.
Há algum tempo se noticiou que a US Navy adotou um sonar tão potente que desorientava baleias e golfinhos a ponto destes encalharem em praias. Há verdade nisso ?
Um sonar que emita o ping com maior potência (volume) teria maior chance de detecção ? Poderia ser mais eficiente nas camadas termais ?
Sim, houve casos e preocupações sobre os impactos dos sonares navais, especialmente os sonares de média e alta frequência, sobre a vida marinha, incluindo baleias e golfinhos. Esses incidentes levaram a questionamentos sobre a relação entre atividades militares utilizando sonar e o encalhe em massa de mamíferos marinhos. Impacto Ambiental dos Sonares: Desorientação: Pesquisas indicaram que a emissão de som de alta intensidade pode desorientar baleias, golfinhos e outras espécies marinhas, potencialmente levando-os a encalhar. Lesões Físicas: Além da desorientação, os sons intensos do sonar podem causar lesões físicas em mamíferos marinhos, incluindo danos auditivos e, em casos extremos, hemorragias… Read more »
Se um sinal tem alcance tão reduzido, como é que foi possível identificar a ocorrência de uma explosão do submarino argentino a milhares de quilômetros?
Claro que a potência de uma explosão é muito maior do que o ruído de um motor de um submarino, por exemplo.
sismógrafos instalados em terra
* sonar
Alto padrão o material (OS);
Parabéns Galante, você pode ser instrutor no CAAML;
Parabéns pelo artigo, que ficou bem didático. “Submarinos sabem com antecedência onde estão os navios inimigos, ouvindo o ruído de suas máquinas e a emissão dos seus sonares ativos.” Eu acredito que um modo de reduzir a vantagem de um submarino inimigo é poder utilizar a propulsão elétrica quando a fragata está em sua busca. Este é um dos motivos que eu acho mais interessante o projeto da DSNS, Sigma 10514, na concorrência da MB, caso o projeto escolhido não for o da própria MB. A propulsão CODOE daquele modelo possibilita a busca por um submarinho inimigo utilizando os motores… Read more »
Alexandre Galante e Bosco, obrigado pelas respostas.
Vale salientar que hoje os navios mais modernos também estão utilizando mais o sonar passivo para detectar submarinos, graças aos sonares rebocados, que estão substituindo os sonares de profundidade variável nas unidades mais modernas. Galante, os submarinos são de difícil detecção pelo navio utilizando o sonar ativo porque como você citou o submarino pode se ocultar em zonas de sombra abaixo da termoclina, mas isso também não afeta o sonar passivo do submarino? Ou seja, um navio não pode simplesmente não ser “ouvido” pelo submarino em determinadas situações e mesmo que o seja não estaria quase que impossível prever sua… Read more »
Nonato 18 de Janeiro de 2018 at 1:29
No caso da explosão do submarino argentino, o sensor que detectou a explosão não foi um sonar –
que capta as ondas acústicas; o sensor utilizado foi um sismógrafo que capta tremores de terra. Então, o que foi captado não foi o “som” da explosão, mas a sua onda de choque.
Abraços.
Jacinto, divulgou-se em novembro do ano passado que foram duas estações hidroacústicas (ou seja, semelhantes a sonares passivos) que detectaram a explosão, e posteriormente a posição mais precisa da mesma foi obtida cruzando-se com dados de estações sísmicas. http://www.naval.com.br/blog/2017/11/29/ara-san-juan-ctbto-divulga-localizacao-mais-exata-da-explosao/ http://www.naval.com.br/blog/2017/11/23/ara-san-juan-nota-da-ctbto-sobre-explosao-detectada-em-15-de-novembro/ Acho que o maior problema e gerador de dúvidas no caso da questão do Nonato é que ele colocou o comentário na matéria errada. Esta aqui é sobre o uso do sonar ativo, que não são visa captar sons de modo passivo (apenas recepção do som, o que proporciona maior alcance), e sim para captar objetos de modo ativo (emissão… Read more »
Esse conceito físico hidro-acústico já era pesquisado e desenvolvido pela marinha norte-americana na 2. guerra mundial. Os submarinos americanos já sabiam que em uma profundidade “padrão” (algo em torno de 70/80 metros), dificilmente eram detectados por navios japoneses, que insistiam em lançar cargas de profundidade programadas para apenas 50/60 metros.
Mas esse segredo acabou quando so japoneses começaram a estabelecer relações entre horários/locais e chegarem a conclusão que a temperatura da água estava influenciando na leitura do sonar.
Depois disso os japoneses começaram a programar suas cargas de profundidade com maior precisão e aumentaram o número de submarinos americanos afundados.
Delfin,
Na verdade não foi questão de potência mas sim de frequência. A USN está adotando sonares de baixa frequência que pode desorientar baleias, golfinhos, etc. Esses sonares são de longo alcance e parecem ser muito efetivos na guerra asntisubmarino.
Em sonares usuais são de média e alta frequência, que têm menor alcance mas maior resolução que o de baixa frequência.
Alguém tem ideia do custo do Sonar Kingklip de média frequência da Thales?